
Understanding Structured Light and 3D Scanning
Podíl
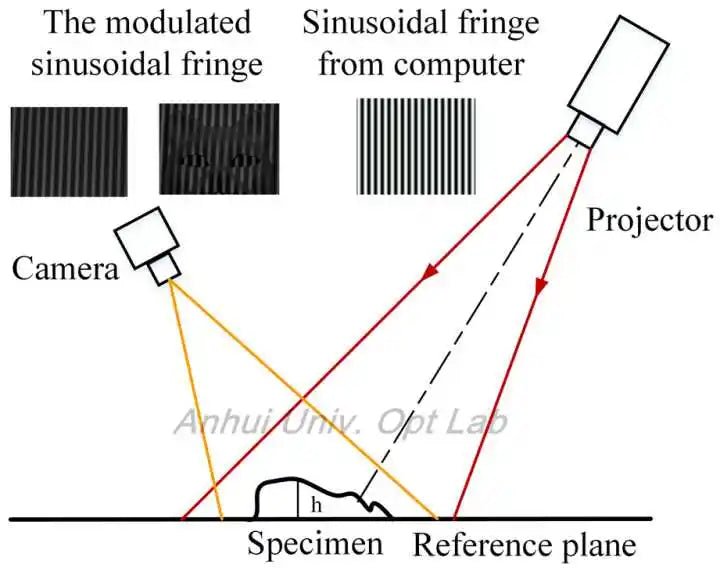
Structured light is a system structure composed of projector and camera. After the projector projects specific light information to the object surface and the background, it is collected by the camera. Calculate the position, depth and other information of the object according to the changes of the optical signal caused by the object, and then restore the entire three-dimensional space.
3D scanner is a scientific instrument used to detect and analyze the shape (geometric structure) and appearance data (such as color, surface albedo and other properties) of objects or environments in the real world. The collected data are often used for 3D reconstruction calculation to create digital models of real objects in the virtual world. These models have a wide range of applications, such as industrial design, flaw detection, reverse engineering, robot guidance, landform measurement, medical information, biological information, criminal identification, digital cultural relics collection, film production, game creation materials, etc.
The production of 3D scanners does not depend on a single technology. Different reconstruction technologies have their advantages and disadvantages, and their costs and prices are different. At present, there is no universal reconstruction technology, and instruments and methods are often limited by the surface characteristics of objects. For example, optical technology is not easy to handle shiny (high albedo), mirror or translucent surfaces, while laser technology is not applicable to fragile or perishable surfaces. The purpose of 3D scanner is to create a point cloud on the geometric surface of an object. These points can be used to interpolate into the surface shape of the object. The denser the point cloud, the more accurate the model can be created (this process is called 3D reconstruction).
If the scanner can obtain the surface color, it can further paste the material map on the reconstructed surface, which is called texture mapping. 3D scanners can be likened to cameras. Their line of sight is conical, and information collection is limited to a certain range. The difference between the two is that the camera captures the color information, while the 3D scanner measures the distance.
Because the measured results contain depth information, they are often referred to as depth images or range images. Due to the limited scanning range of the 3D scanner, it is often necessary to change the relative position of the scanner and the object or place the object on the turntable, and then scan for many times to piece up the complete model of the object. The technology of integrating multiple one-sided models is called image registration or alignment, which involves multiple 3D matching methods.
1 komentář
a2x03c