
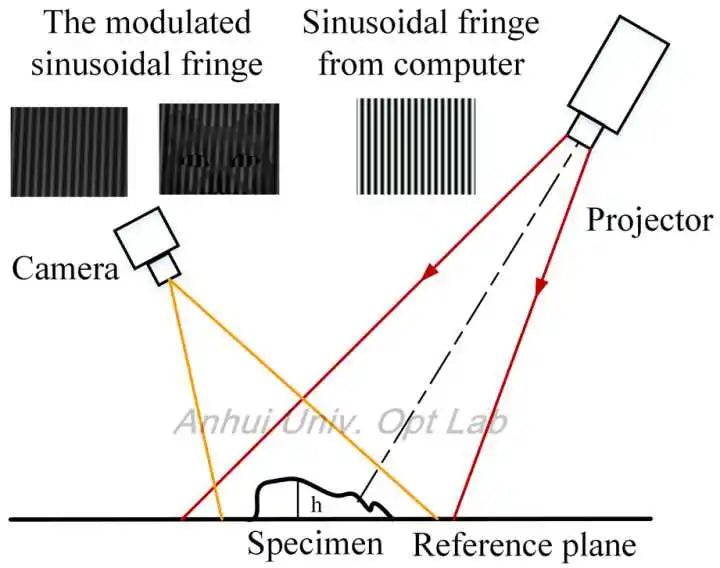
構造化光は、プロジェクターとカメラで構成されるシステム構造です。プロジェクターが特定の光情報を物体の表面や背景に投影し、それをカメラが収集します。物体によって引き起こされる光信号の変化に基づいて、物体の位置や深さなどの情報を計算し、全体の三次元空間を復元します。
3Dスキャナーは、現実世界の物体や環境の形状(幾何学的構造)や外観データ(色、表面アルベドその他の特性など)を検出・解析するための科学機器です。収集されたデータは、3D再構築計算に用いられ、仮想世界における実物のデジタルモデル作成に活用されます。これらのモデルは、工業デザイン、欠陥検出、リバースエンジニアリング、ロボット誘導、地形測量、医療情報、生物情報、犯罪識別、デジタル文化遺産収集、映画制作、ゲーム素材作成など、幅広い用途があります。
3Dスキャナーの製造は単一の技術に依存していません。異なる再構築技術にはそれぞれ利点と欠点があり、コストや価格も異なります。現在、普遍的な再構築技術は存在せず、機器や方法はしばしば対象物の表面特性によって制限されます。例えば、光学技術は光沢のある(高アルベド)、鏡面または半透明の表面の取り扱いが難しい一方で、レーザー技術は壊れやすいまたは腐敗しやすい表面には適用できません。3Dスキャナーの目的は、対象物の幾何学的表面上に点群を作成することです。これらの点は対象物の表面形状を補間するために使用されます。点群が密であればあるほど、より正確なモデルを作成することができます(このプロセスは3D再構築と呼ばれます)。
スキャナーが表面の色を取得できる場合、再構築された表面にマテリアルマップを貼り付けることができ、これをテクスチャマッピングと呼びます。3Dスキャナーはカメラに例えることができます。視線は円錐形であり、情報収集は一定の範囲に限定されます。両者の違いは、カメラが色の情報をキャプチャするのに対し、3Dスキャナーは距離を測定する点です。
測定結果には深度情報が含まれているため、これらはしばしば深度画像またはレンジ画像と呼ばれます。3Dスキャナーのスキャン範囲が限られているため、スキャナーと対象物の相対位置を変更したり、対象物をターンテーブルに置いたりして、複数回スキャンを行い、対象物の完全なモデルを組み立てる必要があります。複数の一方向モデルを統合する技術は画像登録またはアライメントと呼ばれ、複数の3Dマッチング手法が関与します。
Share:
UVプロジェクターを搭載した新型超解像構造化照明顕微鏡技術
高解像度機能性フォトニックコンポーネントのためのUV-LED投影フォトリソグラフィ