
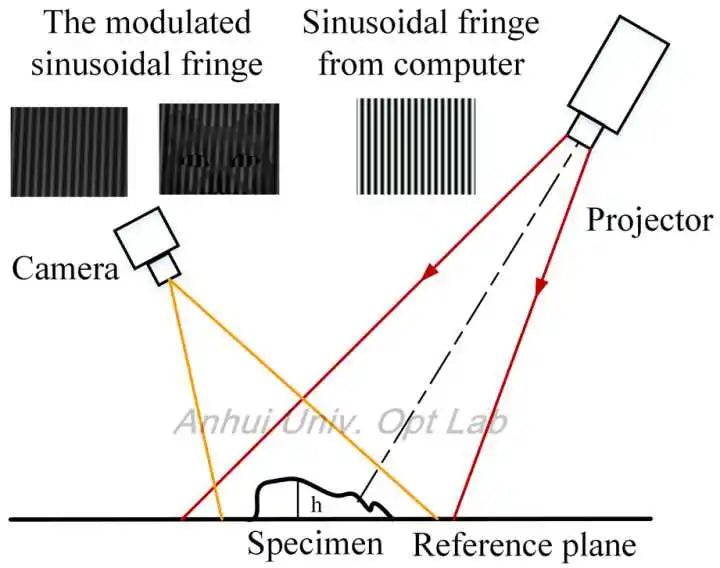
구조화 조명은 프로젝터와 카메라로 구성된 시스템 구조입니다. 프로젝터가 특정 광 정보를 물체 표면과 배경에 투사한 후, 카메라가 이를 수집합니다. 물체에 의해 발생한 광 신호의 변화를 바탕으로 물체의 위치, 깊이 등의 정보를 계산한 후 전체 3차원 공간을 복원합니다.
3D 스캐너는 실제 세계의 물체나 환경의 형태(기하학적 구조)와 외관 데이터(색상, 표면 반사율 및 기타 특성 등)를 감지하고 분석하는 데 사용되는 과학 기기입니다. 수집된 데이터는 종종 3D 재구성 계산에 사용되어 가상 세계에서 실제 물체의 디지털 모델을 생성합니다. 이러한 모델은 산업 디자인, 결함 감지, 역공학, 로봇 안내, 지형 측정, 의료 정보, 생물학 정보, 범죄 식별, 디지털 문화재 수집, 영화 제작, 게임 제작 자료 등 다양한 분야에 활용됩니다.
3D 스캐너의 제작은 단일 기술에 의존하지 않습니다. 다양한 재구성 기술은 각각 장단점이 있으며, 비용과 가격도 다릅니다. 현재 보편적인 재구성 기술은 없으며, 기기와 방법은 종종 물체의 표면 특성에 의해 제한됩니다. 예를 들어, 광학 기술은 반짝이는(높은 반사율), 거울 또는 반투명 표면을 다루기 어렵고, 레이저 기술은 깨지기 쉽거나 부패하기 쉬운 표면에는 적용할 수 없습니다. 3D 스캐너의 목적은 물체의 기하학적 표면에 점군을 생성하는 것입니다. 이 점들은 물체의 표면 형태를 보간하는 데 사용될 수 있습니다. 점군이 촘촘할수록 더 정확한 모델을 만들 수 있습니다(이 과정을 3D 재구성이라고 합니다).
스캐너가 표면 색상을 얻을 수 있다면, 재구성된 표면에 재질 지도를 추가할 수 있는데, 이를 텍스처 매핑이라고 합니다. 3D 스캐너는 카메라에 비유할 수 있습니다. 시야는 원뿔형이며, 정보 수집은 일정 범위 내로 제한됩니다. 두 장치의 차이점은 카메라는 색상 정보를 캡처하는 반면, 3D 스캐너는 거리를 측정한다는 점입니다.
측정된 결과에는 깊이 정보가 포함되어 있기 때문에 종종 깊이 이미지 또는 거리 이미지라고 불립니다. 3D 스캐너의 제한된 스캔 범위로 인해 스캐너와 물체의 상대 위치를 변경하거나 물체를 회전판 위에 놓고 여러 번 스캔하여 물체의 완전한 모델을 조합해야 하는 경우가 많습니다. 여러 개의 단면 모델을 통합하는 기술을 이미지 정합 또는 정렬이라고 하며, 이는 여러 3D 매칭 방법을 포함합니다.
Share:
UV 프로젝터를 탑재한 새로운 유형의 초고해상도 구조광 현미경 기술
고해상도 기능성 광자 부품용 UV-LED 프로젝션 포토리소그래피